

EstimatedPointProcess
EstimatedPointProcess[pdata,pproc]
estimates the parametric point process pproc from point data pdata.
EstimatedPointProcess[pdata,pproc,{{p,p0},{q,q0},…}]
estimates the parameters p, q, … with starting values p0, q0, ….
Details and Options
- EstimatedPointProcess takes point data pdata and returns the symbolic point process pproc with parameter estimates inserted for any non-numeric values.
-
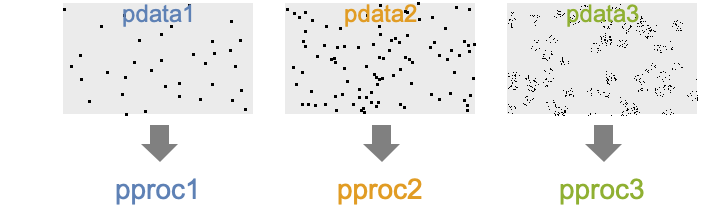
- In general, a process pproc can be better estimated from an ensemble of point data.
-

- The points pdata can have the following forms:
-
{p1,p2,…} points pi GeoPosition[…],GeoPositionXYZ[…],… geographic points SpatialPointData[…] spatial point collection {pts,reg} point collection pts and observation region reg - The points are converted to a SpatialPointData object and a Ripley–Rasson estimator is used to generate the observation region if it is not provided in pdata.
- The following options can be given:
-
AccuracyGoal Automatic the accuracy sought PointProcessEstimator Automatic what process parameter estimator to use PrecisionGoal Automatic the precision sought WorkingPrecision Automatic the precision used in internal computations - Settings for PointProcessEstimator are documented under the individual point process reference pages.
Examples
open all close allBasic Examples (1)
Estimate the parameter of a PoissonPointProcess:
data = RandomPointConfiguration[PoissonPointProcess[20, 2], Disk[]];eproc = EstimatedPointProcess[data, PoissonPointProcess[mu, 2]]Compare the nearest neighbor function of the estimated process to the original data:
gdata = NearestNeighborG[data];
gproc = NearestNeighborG[eproc];Plot[{gdata[r], gproc[r]}, {r, 0, 0.3}]Scope (3)
Cluster point processes (1)
Simulate a point configuration from a Matern point process:
proc = MaternPointProcess[20, 30, 1, 2];
points = RandomPointConfiguration[proc, Rectangle[]];ListPlot[points]Use the "FindClusters" method to estimate a point process model:
est = EstimatedPointProcess[points, MaternPointProcess[a, b, c, d], PointProcessEstimator -> "FindClusters"]Compare the Ripley ![]() measure between the original process and the estimated model:
measure between the original process and the estimated model:
DiscretePlot[{RipleyK[est, r], RipleyK[proc, r]}, {r, 0.1, .5, .005}, PlotLegends -> {"original process", "estimated model"}]Gibbs point processes (2)
Estimate a hardcore point process:
proc = HardcorePointProcess[30, .1, 2];
points = RandomPointConfiguration[proc, Disk[]];ListPlot[points]EstimatedPointProcess[points, HardcorePointProcess[a, b, c]]Explicitly specify estimation method and starting values for parameters:
a0 = points["MeanPointCount"];
b0 = Min[DeleteCases[Flatten[DistanceMatrix[points["Points"]]], 0. | 0]];EstimatedPointProcess[points, HardcorePointProcess[a, b, 2], {{a, a0}, {b, b0}}, Method -> "MaximumPseudoLikelihood"]Estimate an interaction point process:
proc = StraussPointProcess[100, 0.5, 0.1, 2];
reg = Rectangle[];pts = RandomPointConfiguration[proc, reg, 3]ListPlot[pts]EstimatedPointProcess[pts, StraussPointProcess[μ, γ, R, 2]]Options (3)
PointProcessEstimator (2)
Estimate a cluster point process:
proc = ThomasPointProcess[20, 30, 1, 2];
points = RandomPointConfiguration[proc, Rectangle[]];Use the "FindClusters" method to estimate a point process model:
EstimatedPointProcess[points, ThomasPointProcess[a, b, c, d], PointProcessEstimator -> "FindClusters"]EstimatedPointProcess[points, ThomasPointProcess[a, b, c, d], PointProcessEstimator -> "MethodOfMoments"]Estimate an interaction process:
proc = HardcorePointProcess[40, .1, 2];
points = RandomPointConfiguration[proc, Rectangle[]];Use "MaximumPseudoLikelihood" method:
EstimatedPointProcess[points, HardcorePointProcess[a, b, c], PointProcessEstimator -> "MaximumPseudoLikelihood"]Use "MaximumLikelihood" method:
EstimatedPointProcess[points, HardcorePointProcess[a, b, c], PointProcessEstimator -> "MaximumLikelihood"]WorkingPrecision (1)
Estimate a cluster point process with arbitrary precision:
proc = PoissonPointProcess[30, 2];
points = RandomPointConfiguration[proc, Disk[], WorkingPrecision -> 20];Specify WorkingPrecision:
EstimatedPointProcess[points, PoissonPointProcess[μ, d], WorkingPrecision -> 20]EstimatedPointProcess uses MachinePrecision as default:
EstimatedPointProcess[points, PoissonPointProcess[μ, d]]Text
Wolfram Research (2020), EstimatedPointProcess, Wolfram Language function, https://reference.wolfram.com/language/ref/EstimatedPointProcess.html.
CMS
Wolfram Language. 2020. "EstimatedPointProcess." Wolfram Language & System Documentation Center. Wolfram Research. https://reference.wolfram.com/language/ref/EstimatedPointProcess.html.
APA
Wolfram Language. (2020). EstimatedPointProcess. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/EstimatedPointProcess.html