

HolderModel
represents the single-input, single-output model of a zero-order hold.
HolderModel[specs]
represents a holder with specifications specs.
Details
- HolderModel is known as zero-order hold (ZOH), first-order hold (FOH) and inverse sampling.
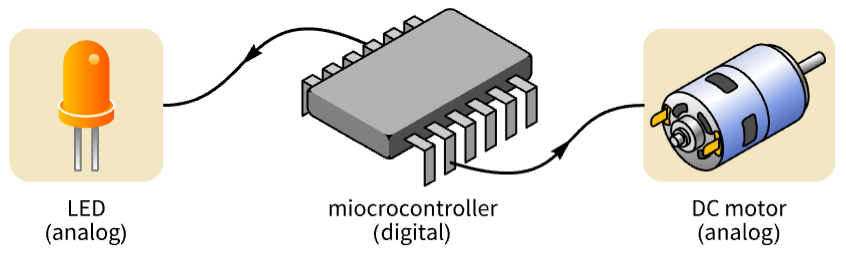
- HolderModel is typically used to convert a discrete-time signal coming from a digital microcontroller or a digital signal processor to a continuous-time signal used when actuating in the physical world or with a model of the physical world.
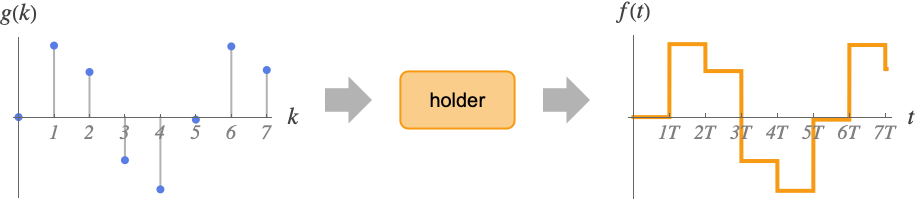
- A holder is the model of an operation that takes a discrete-time signal
 defined for integers and generates a continuous-time signal
defined for integers and generates a continuous-time signal ![f(t)=g(TemplateBox[{{t, /, T}}, Floor])](Files/HolderModel.en/3.png "f(t)=g(TemplateBox[{{t, /, T}}, Floor])") , where
, where  is the sampling period. This holds the value constant between samples.
is the sampling period. This holds the value constant between samples. - The specification spec is an association and can have the following keys:
-
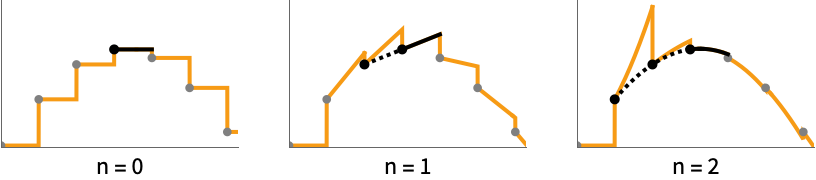
"InputVariables" {u[t]} input variables "Order" 0 hold order, a non-negative integer "OutputVariables" {y[t]} output variables "SamplingPeriod" 1 sampling period "SignalCount" 1 number of inputs and outputs "TemporalVariable" t temporal variable - The "Order" property specifies the order of the extrapolation to use. An order
 extrapolator uses the
extrapolator uses the  previous points to derive an interpolating polynomial of degree
previous points to derive an interpolating polynomial of degree  . This polynomial is then used to extrapolate the value over the next sampling period.
. This polynomial is then used to extrapolate the value over the next sampling period. - HolderModel[…]["prop"] can be used to obtain various properties of the model.
- The value of "prop" can be any of the keys in spec and the following:
-
"Properties" list of property names "PropertyAssociation" property names and values as an association "PropertyDataset" property names and values as a dataset {p1,p2,…} values of properties pi
Examples
open all close allBasic Examples (2)
A zero-order hold (ZOH) model:
HolderModel[]%["PropertyDataset"]Simulate the response of a ZOH to a sinusoidal input:
r = InputOutputResponse[HolderModel[], Table[Sin[t], {t, 0, 3π}]]Plot the response and the input sequence:
Show[Plot[r, {, 0, 3π}], ListPlot[Table[{t, Sin[t]}, {t, 0, 3π}], IconizedObject[«opts»]]]Scope (9)
HolderModel[]HolderModel[<|"Order" -> 1|>]A hold with custom properties:
HolderModel[<|"InputVariables" -> u[t], "OutputVariables" -> y[t], "TemporalVariable" -> t|>]%["Dataset"]List all available properties:
HolderModel[Association["DiscreteVariables" -> {Subscript[, 1][t]}, "InputVariables" -> {u[t]},
"OutputVariables" -> {y[t]}, "InitialStateValues" -> {}, "TemporalVariable" -> t,
"WhenEvent" -> Mod[t, 1] == 0, "WhenEventAction" -> {Subscript[ ... tion", "StateEquations",
"OutputExpressions", "SignalCount", "Type", "PropertyFunction", "Order", "SamplingPeriod",
"SummaryItems"}], {"InputVariables", "Order", "OutputVariables", "SamplingPeriod",
"SignalCount", "TemporalVariable"}]["Properties"]HolderModel[Association["DiscreteVariables" -> {Subscript[, 1][t]}, "InputVariables" -> {u[t]},
"OutputVariables" -> {y[t]}, "InitialStateValues" -> {}, "TemporalVariable" -> t,
"WhenEvent" -> Mod[t, 1] == 0, "WhenEventAction" -> {Subscript[ ... tion", "StateEquations",
"OutputExpressions", "SignalCount", "Type", "PropertyFunction", "Order", "SamplingPeriod",
"SummaryItems"}], {"InputVariables", "Order", "OutputVariables", "SamplingPeriod",
"SignalCount", "TemporalVariable"}]["SamplingPeriod"]HolderModel[Association["DiscreteVariables" -> {Subscript[, 1][t]}, "InputVariables" -> {u[t]},
"OutputVariables" -> {y[t]}, "InitialStateValues" -> {}, "TemporalVariable" -> t,
"WhenEvent" -> Mod[t, 1] == 0, "WhenEventAction" -> {Subscript[ ... tion", "StateEquations",
"OutputExpressions", "SignalCount", "Type", "PropertyFunction", "Order", "SamplingPeriod",
"SummaryItems"}], {"InputVariables", "Order", "OutputVariables", "SamplingPeriod",
"SignalCount", "TemporalVariable"}][{"Order", "SignalCount"}]Obtain the properties as an association:
HolderModel[Association["DiscreteVariables" -> {Subscript[, 1][t]}, "InputVariables" -> {u[t]},
"OutputVariables" -> {y[t]}, "InitialStateValues" -> {}, "TemporalVariable" -> t,
"WhenEvent" -> Mod[t, 1] == 0, "WhenEventAction" -> {Subscript[ ... tion", "StateEquations",
"OutputExpressions", "SignalCount", "Type", "PropertyFunction", "Order", "SamplingPeriod",
"SummaryItems"}], {"InputVariables", "Order", "OutputVariables", "SamplingPeriod",
"SignalCount", "TemporalVariable"}]["PropertyAssociation"]HolderModel[Association["DiscreteVariables" -> {Subscript[, 1][t]}, "InputVariables" -> {u[t]},
"OutputVariables" -> {y[t]}, "InitialStateValues" -> {}, "TemporalVariable" -> t,
"WhenEvent" -> Mod[t, 1] == 0, "WhenEventAction" -> {Subscript[ ... tion", "StateEquations",
"OutputExpressions", "SignalCount", "Type", "PropertyFunction", "Order", "SamplingPeriod",
"SummaryItems"}], {"InputVariables", "Order", "OutputVariables", "SamplingPeriod",
"SignalCount", "TemporalVariable"}]["PropertyDataset"]Simulate the response of a first-order hold to a sinusoidal sequence:
Short[r1 = InputOutputResponse[HolderModel[<|"Order" -> 1|>], Table[Sin[t], {t, 0, 2.5π}]]]Plot the response and the sequence:
Show[Plot[r1, {, 0, 2.5π}, PlotRange -> All], ListPlot[Table[{t, Sin[t]}, {t, 0, 2.5π}], IconizedObject[«opts»]]]Decrease the sampling period to obtain a better approximation of the sinusoid:
Short[r2 = InputOutputResponse[HolderModel[<|"Order" -> 1, "SamplingPeriod" -> 0.5|>], Table[Sin[t], {t, 0, 2.5π, 0.5}]]]Plot the response and the input sequence of the better approximation:
Show[Plot[r2, {, 0, 2.5π}, PlotRange -> All], ListPlot[Table[{t, Sin[t]}, {t, 0, 2.5π, 0.5}], IconizedObject[«opts»]]]The lower sampling period results in a better approximation:
NIntegrate[Abs /@ {Sin[] - r1[[1]], Sin[] - r2[[1]]}, {, 0, 2.5π}]Applications (1)
A holder model is a subsystem of a sampled data system:
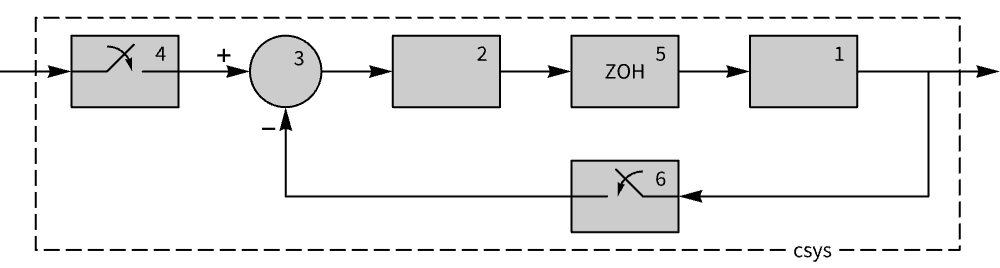
csys = SystemsConnectionsModel[{TransferFunctionModel[{{{1.}}, (1 + s)^3}, s],
TransferFunctionModel[{{{4.539074548064891 - 9.145098981931369* + 4.606282997931085*^2}},
{{0.23358983848622455 - 0.5071796769724491* + 0.2735898384862246*^2}}}, , ... ummaryItems"}], {"InputVariables", "OutputVariables", "SamplingPeriod", "SignalCount",
"TemporalVariable"}]}, {{4, 1} -> {3, 1}, {3, 1} -> {2, 1}, {2, 1} -> {5, 1}, {5, 1} -> {1, 1},
{1, 1} -> {6, 1}, {6, 1} -> {3, 2}}, {{4, 1}}, {{1, 1}}];r = InputOutputResponse[csys, 1, {t, 0, 10}]Plot[r, {t, 0, 10}]Properties & Relations (3)
A sampler model is essentially a time-based action:
u = Tanh[t];
sp = 0.5;The response based on WhenEvent:
r1 = NDSolveValue[{WhenEvent@@{Mod[t, sp] == 0, y[t] -> u}, y[0] == 0, Derivative[1][$][t] == 0, $[0] == 0}, y[t], {t, 0, 5}, DiscreteVariables -> {y[t]}]The response of sampler model:
r2 = InputOutputResponse[SamplerModel[<|"SamplingPeriod" -> sp|>], u, {t, 0, 5}]Plot[{r1, r2}, {t, 0, 5}, PlotRange -> All]A first-order hold is based on a linear interpolation of the current and previous input values:
u = Tanh[t];
sp = 0.5;The variable ![]() is the current input value,
is the current input value, ![]() is the previous input value and
is the previous input value and ![]() is the total time elapsed:
is the total time elapsed:
action = {Subscript[x, 1][t], Subscript[x, 2][t], 𝒯[t]} -> {u, Subscript[x, 1][t], 𝒯[t] + sp};The discrete variables ![]() ,
, ![]() and
and ![]() are updated at each sampling instant:
are updated at each sampling instant:
we = WhenEvent@@{Mod[t, sp] == 0, action}Solve for the slope ![]() and intercept
and intercept ![]() of the linear interpolation:
of the linear interpolation:
sol = Solve[{Subscript[x, 1][t] == m 𝒯[t] + c, Subscript[x, 2][t] == m(𝒯[t] - sp) + c}, {m, c}]out = m t + c /. sol//Simplifyr1 = NDSolveValue[{we, Derivative[1][$][t] == 0, $[0] == 0, Subscript[x, 1][0] == 0, Subscript[x, 2][0] == 0, 𝒯[0] == 0}, out, {t, 0, 5}, DiscreteVariables -> {Subscript[x, 1][t], Subscript[x, 2][t], 𝒯[t]}]The solution using the holder model:
r2 = InputOutputResponse[HolderModel[<|"SamplingPeriod" -> sp, "Order" -> 1|>], u, {t, 0, 5}]Plot[{r1, r2}, {t, 0, 5}, PlotRange -> All]A holder model inverses the operation of a sampler model:
f = 3;
u = Sech[f t];
sp = 1 / ( 50f);A sampler model in series with a holder model:
sys = SystemsConnectionsModel[{SamplerModel[<|"SamplingPeriod" -> sp|>], HolderModel[<|"SamplingPeriod" -> sp|>]}, {{1, 1} -> {2, 1}}, {{1, 1}}, {{2, 1}}]The output signal is the same as the input signal:
InputOutputResponse[sys, u, {t, 0, π}];
Plot[{u, %[[1]]}, {t, 0, π}, PlotRange -> All]Text
Wolfram Research (2024), HolderModel, Wolfram Language function, https://reference.wolfram.com/language/ref/HolderModel.html.
CMS
Wolfram Language. 2024. "HolderModel." Wolfram Language & System Documentation Center. Wolfram Research. https://reference.wolfram.com/language/ref/HolderModel.html.
APA
Wolfram Language. (2024). HolderModel. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/HolderModel.html