



SystemModelValidate
SystemModelValidate[sys,req]
validates the requirement req in the system model sys.
SystemModelValidate[sys,req,spec]
validates the requirement req according to spec.
SystemModelValidate[sim,…]
validates the requirement for the SystemModelSimulationData object sim.
SystemModelValidate[…,"prop"]
gives the value of the property "prop".
Details and Options
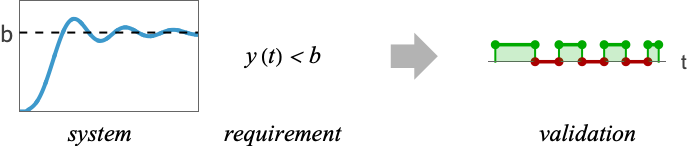
- SystemModelValidate is typically used to validate system behaviors related either to safety or performance requirements.
- The requirement req is used to describe how signals evolve over time and will be either true or false as a whole for the system sys.
- The requirement req is specified using the following temporal scoping constructs:
-
SystemModelAlways[t,texpr] texpr is always true for 
SystemModelEventually[t,texpr] texpr is eventually true for 
- The global values
 and
and  are given by the simulation interval of the system sys by default.
are given by the simulation interval of the system sys by default. - The temporal expression texpr is a Boolean-valued function of time t and can be given as:
-
f1[t]<=f2[t], f1[t]>=f2[t], ... with f1[t] and f2[t] real valued b1[t]&&b2[t],b1[t]b2[t], ... with b1[t] and b2[t] Boolean valued SystemModelSustain[texpr,{min,max}] when texpr is True at least min and at most max time units SystemModelUntil[texpr1,texpr2] when texpr1 is True until texpr2 first becomes True SystemModelDelay[texpr,δ] when texpr[t-δ] is True - The time variable t is specified in the scoping constructs SystemModelAlways or SystemModelEventually.
- SystemModelValidate returns a SystemModelValidationData object val by default that can be used to extract additional properties using the form val["prop"].
- SystemModelValidate[…,"prop"] can be used to directly get the value of val["prop"].
- Validations with uncertainty in parameter, initial values or input signals return success probability, with optional failure configuration reporting.
- Specifications in the association spec related to uncertainty include:
-
"InitialValues" {v1val1,…} variable vi has initial value vali "Inputs" {in1fun1,…} input ini has value funi "ParameterValues" {p1val1,…} parameter pi has value vali - Specifications in spec related to reporting and simulation include:
-
"MaxFailureIntervals" Automatic number of failure configurations to report "SimulationCount" 200 target number of simulations "SimulationInterval" {tmin,tmax} simulate from time tmin to tmax - Typical properties that can be retrieved with SystemModelValidate[…,"prop"] include:
-
"Configuration" failure configurations to report "FailureIntervals" intervals of t at which texpr is False "FailureIntervalsPlot" plot of failure intervals "FailurePlot" plot of validation of texpr "FirstFailureTime" first t at which texpr is False "SuccessProbability" requirement validation result - The system model sys can have the following forms:
-
SystemModel[…] general system model StateSpaceModel[…] state-space model TransferFunctionModel[…] transfer function model AffineStateSpaceModel[…] affine state-space model NonlinearStateSpaceModel[…] nonlinear state-space model DiscreteInputOutputModel[…] discrete input-output model - When multiple sources of uncertainty are provided, simulations are performed covering their combinations, using the target number of simulations as an upper bound.
- The values vali in "ParameterValues" and "InitialValues" can take the following forms:
-
pval a single value {pval1,…} custom list of values randomly sampled int an Interval or CenteredInterval uniformly sampled dist an Around or a distribution to sample reg a region to sample uniformly - Multidimensional regions and distributions vald for sets of d variables can be set with {v1,…,vd}vald.
- The inputs funi in "Inputs" can take the following forms:
-
f a single function f[t] at time t {f1,…} a custom list of functions randomly sampled rproc a random process to sample - Vector-valued functions and processes fund for sets of d inputs can be set with {in1,…,ind}fund.
- The following options can be given:
-
Method Automatic what simulation method to use ProgressReporting $ProgressReporting control display of progress SamplingPeriod Automatic sample period for random processes
Examples
open all close allBasic Examples (3)
Validate a bound in the voltage of a resistor in a model of a circuit:
val = SystemModelValidate[[image], SystemModelAlways[t, "R2.p.v"[t] < 0.55]]Plot the voltage and the bound:
SystemModelPlot[[image], {"R2.p.v", 0.55}, PlotRange -> All]val["FailurePlot", 1]Validate safety bounds in the temperature response of a heating system when the incoming heat flow is in a region:
model = \!\(\*GraphicsBox[«8»]\);Set the interval for the heat flow:
uncertainty = <|"ParameterValues" -> {"burner.Q_flow" -> Quantity[Interval[{1500, 1800}], "Watts"]}|>;Validate for all times after 2000 seconds:
SystemModelValidate[model, SystemModelAlways[t, 2001 ≤ t, 342.15 < "heater.mediums[1].T"[t] < 343.65], Join[uncertainty, <|"SimulationCount" -> 50|>]]Plot the uncertainty in the temperature for the given heat flow interval together with the bounds:
SystemModelUncertaintyPlot[model, Join[<|"Outputs" -> "heater.mediums[1].T"|>, uncertainty, <|"SimulationCount" -> 50|>], ...]Validate bounds for the position of a camera in a model of vertical stabilization against force disturbances in the form of white noise:
model = \!\(\*GraphicsBox[«8»]\);uncertainty = <|"Inputs" -> {"fw" -> WhiteNoiseProcess[1000]}|>;Validate the condition for the whole simulation interval:
SystemModelValidate[model, SystemModelAlways[t, -0.02 < "xce"[t] < 0.02], Join[uncertainty, <|"SimulationCount" -> 50|>], IconizedObject[«option»]]Plot the uncertainty in the position of the camera together with the bounds:
SystemModelUncertaintyPlot[model, Join[<|"Outputs" -> "xce", "SimulationCount" -> 50|>, uncertainty], ...]Scope (21)
Basic Uses (3)
Validate the requirement, "The DC voltage in the rectifier should not exceed 540 V for more than 0.002 s.":
req = SystemModelAlways[t, !SystemModelSustain["uDC"[t] > 540, {0.002, ∞}]];val = SystemModelValidate[\!\(\*GraphicsBox[«8»]\), req]val["FailurePlot", 1]The DC voltage goes above 540 for 0.00252 s:
ArcLength /@ val["FailureIntervals", 1]Start with a model of a tank system and simulate it for 30 s:
sim = SystemModelSimulate[[image], 30];Validate the requirement, "Whenever the water level in the first tank is above 1.2 m, and for at least 6 s more, the water level in the second tank should be above 0.6 m.":
req = SystemModelAlways[t, SystemModelDelay[1.2 < "tank1.h"[t], {0, 6}]0.6 < "tank2.h"[t]];val = SystemModelValidate[sim, req]val["FailurePlot", 1]The water level in the second tank goes below 0.6 m too early:
SystemModelPlot[sim, {"tank2.h", 0.6}]Start with a model of a controlled inverted pendulum system:
model = [image];Validate the requirement, "Whenever the angular velocity in the motor is below 700 rad/s until the position of the cart reaches 0.9 m, the angle of the pendulum must be between ![]() and 0.1 rad.":
and 0.1 rad.":
req = SystemModelAlways[t, SystemModelUntil["extendedSystem.dcMotor.w"[t] < 700, 0.9 ≤ "x"[t]]Abs["phi"[t]] < 0.1];Specify uncertainty for the resistance in the motor and set a number of simulations:
spec = <|"ParameterValues" -> <|"extendedSystem.dcMotor.R" -> Quantity[Interval[{10, 15}], "Ohms"]|>, "SimulationCount" -> 50|>;The model fails the requirement in all simulations:
val = SystemModelValidate[model, req, spec]Show the failure plot for the stored failure configuration:
val["FailurePlot", 1]Simulate with the failure configuration:
sim = SystemModelSimulate[model, val["Configuration", 1]]The angle of the pendulum fails this control specification:
SystemModelPlot[sim, {-0.1, "phi", 0.1}, PlotRange -> All]Systems (3)
Validate a requirement for a state variable in an AffineStateSpaceModel:
SystemModelValidate[AffineStateSpaceModel[{{2*Cos[Subscript[x, 2]] -
Cos[Subscript[x, 1]*Subscript[x, 2]],
-Cos[1 + Subscript[x, 2]] + Subscript[x, 1]}, {{1}, {0}},
{-Subscript[x, 1]}, {{0}}}, {Subscript[x, 1],
Subscript[x, 2]}, {{u, 0}}, {Automatic}, Automatic,
SamplingPeriod -> None], SystemModelAlways[t, -Subscript[x, 1][t] < 0.5]]Validate a SystemModelEventually requirement for the step response of an output variable in a TransferFunctionModel with a parameter that follows a normal distribution:
spec = <|"ParameterValues" -> {a -> NormalDistribution[1, 0.1]}, "Inputs" -> {1 -> UnitStep}|>;The requirement is for the output to have a lower bound:
req = SystemModelEventually[t, 1.6 ≤ Subscript[, 1][t]];This requirement generally fails:
SystemModelValidate[TransferFunctionModel[{{{2*(1 - a*s)}},
2*(1 + s/2 + s^2)}, s], req, spec]Validate a requirement for the output and input variables in a DiscreteInputOutputModel:
diom = DiscreteInputOutputModel[Association["SampledSeries" -> TemporalData[TimeSeries,
{{{{a + u[0]}, {(u[0] + a*u[1])/2}, {(u[0] + a*u[1] + 2*a*u[2])/3}}}, {{0, 2, 1}}, 1,
{"Discrete", 1}, {"Discrete", 1}, {1}, {MissingDataMethod -> None,
... ime", "LastValue", "OutputCount", "OutputVariables", "Path",
"PathComponent", "PathComponents", "PathFunction", "PathLength", "SamplingPeriod", "StateCount",
"TemporalData", "TimePath", "Times", "TimeSeries", "TimeValues", "Type", "Values"}];Specify a parameter uncertainty on a, an input sequence u and a simulation count:
spec = <|"ParameterValues" -> {a -> NormalDistribution[4, 0.5]}, "Inputs" -> {u -> TimeSeries[Sin[Range[-5, 5]]]}, "SimulationCount" -> 50|>;The requirement is that the output y[t] is bounded by the input u[t]:
req = SystemModelAlways[t, Abs[y[t]] ≤ Abs[u[t]] + 4];This requirement generally fails:
SystemModelValidate[diom, req, spec]Requirements (2)
The model simulation interval is used when time domain conditions are not given in a SystemModelAlways requirement:
model = \!\(\*GraphicsBox[«8»]\);SystemModelValidate[model, SystemModelAlways[t, Abs["uDC"[t]] < 545]]SystemModelValidate[model, SystemModelAlways[t, 0.02 ≤ t, Abs["uDC"[t]] < 545]]The model simulation interval is used when time domain conditions are not given in an SystemModelEventually requirement:
model = \!\(\*GraphicsBox[«8»]\);SystemModelValidate[model, SystemModelEventually[t, Abs["uDC"[t]] > 545]]SystemModelValidate[model, SystemModelEventually[t, 0.02 ≤ t, Abs["uDC"[t]] > 545]]Specifications (3)
Select a number of simulations to perform with "SimulationCount" when parameters, initial values or inputs have uncertainty:
req = SystemModelEventually[t, 1.6 ≤ Subscript[, 1][t]];Specify a parameter uncertainty on a and an input function:
spec = <|"ParameterValues" -> {a -> NormalDistribution[1, 0.1]}, "Inputs" -> {1 -> UnitStep}|>;val = SystemModelValidate[TransferFunctionModel[{{{2*(1 - a*s)}},
2*(1 + s/2 + s^2)}, s], req, Append[spec, "SimulationCount" -> 50]]Retrieve the number of simulations:
val["SimulationCount"]Select a simulation interval to use in validation with "SimulationInterval":
req = SystemModelEventually[t, 1.6 ≤ Subscript[, 1][t]];Specify a parameter uncertainty on a and an input function:
spec = <|"ParameterValues" -> {a -> NormalDistribution[1, 0.1]}, "Inputs" -> {1 -> UnitStep}|>;val = SystemModelValidate[TransferFunctionModel[{{{2*(1 - a*s)}},
2*(1 + s/2 + s^2)}, s], req, Append[spec, "SimulationInterval" -> {0, 2.5}]]Retrieve the simulation interval:
val["SimulationInterval"]Select a maximum number of failure configurations for each requirement with "MaxFailureIntervals":
req = SystemModelEventually[t, 1.6 ≤ Subscript[, 1][t]];Specify a parameter uncertainty on a and an input function:
spec = <|"ParameterValues" -> {a -> NormalDistribution[1, 0.1]}, "Inputs" -> {1 -> UnitStep}|>;val = SystemModelValidate[TransferFunctionModel[{{{2*(1 - a*s)}},
2*(1 + s/2 + s^2)}, s], req, Append[spec, "MaxFailureIntervals" -> 2]]Retrieve the failure intervals:
val["FailureIntervals"]Uncertainty in Values (5)
Validate a requirement with uncertainty generated from giving a list of values for a parameter:
unc = <|"ParameterValues" -> {a -> Range[0, 2, 0.1]}|>;input = <|"Inputs" -> {1 -> UnitStep}|>;SystemModelValidate[TransferFunctionModel[{{{2*(1 - a*s)}},
2*(1 + s/2 + s^2)}, s], SystemModelEventually[t, 1.6 ≤ Subscript[, 1][t]], Join[unc, input]]Validate a requirement with uncertainty generated from sampling an interval for a parameter value:
unc = <|"ParameterValues" -> {a -> Interval[{0, 2}]}|>;input = <|"Inputs" -> {1 -> UnitStep}|>;SystemModelValidate[TransferFunctionModel[{{{2*(1 - a*s)}},
2*(1 + s/2 + s^2)}, s], SystemModelEventually[t, 1.6 ≤ Subscript[, 1][t]], Join[unc, input]]Validate a requirement with uncertainty generated from sampling a distribution for a parameter value:
unc = <|"ParameterValues" -> {a -> NormalDistribution[1, 1]}|>;input = <|"Inputs" -> {1 -> UnitStep}|>;SystemModelValidate[TransferFunctionModel[{{{2*(1 - a*s)}},
2*(1 + s/2 + s^2)}, s], SystemModelEventually[t, 1.6 ≤ Subscript[, 1][t]], Join[unc, input]]Validate a requirement with uncertainty generated from sampling a geometric region for a parameter value:
unc = <|"ParameterValues" -> {a -> MeshRegion[{{0}, {1}, {2}}, Line[{1, 2, 3}]]}|>;input = <|"Inputs" -> {1 -> UnitStep}|>;SystemModelValidate[TransferFunctionModel[{{{2*(1 - a*s)}},
2*(1 + s/2 + s^2)}, s], SystemModelEventually[t, 1.6 ≤ Subscript[, 1][t]], Join[unc, input]]Validate a requirement with uncertainty generated from sampling a Circle for two parameter values:
unc = <|"ParameterValues" -> {{a, b} -> Circle[{1, 1}, 0.2]}|>;input = <|"Inputs" -> {1 -> UnitStep}|>;SystemModelValidate[TransferFunctionModel[{{{2*(1 + b - a*s)}},
2*(1 + s/2 + s^2)}, s], SystemModelEventually[t, 1.6 ≤ Subscript[, 1][t]], Join[unc, input]]Uncertainty in Inputs (3)
Validate a requirement with uncertainty generated when an ARIMAProcess is used for an input:
unc = <|"Inputs" -> {"T" -> ARIMAProcess[{-0.8}, 1, {.01}, 10 ^ -6]}|>;Specify a simulation interval and a number of simulations:
sim = <|"SimulationInterval" -> {0, 10}, "SimulationCount" -> 50|>;req = SystemModelAlways[t, -0.0001 < "syse.sys.rs"[t] < 0.0001];SystemModelValidate[[image], req , Join[unc, sim]]Validate a requirement with uncertainty generated when using a two-dimensional process for two inputs:
unc = <|"Inputs" -> {{"V", "TL"} -> MAProcess[{{{.2, .1}, {-.1, .2}}}, {{0.001, 0}, {0, 0.001}}]}|>;Specify a number of simulations:
sim = <|"SimulationCount" -> 50|>;req = SystemModelAlways[t, -0.2 < "w"[t] < 0.2];SystemModelValidate[\!\(\*GraphicsBox[«8»]\), req , Join[unc, sim]]Validate a requirement with uncertainty generated when several functions are used as input:
inputs = Table[With[{k = k}, Function[t, 0.1 (k Tanh[t] + 0.1 k Sin[0.15 t])]], {k, 1, 10}];Plot[Through[inputs[x]], {x, 0, 60}]Use these profiles for the input flow rate in a continuous stirred tank reactor:
unc = <|"Inputs" -> {"deltaFJ" -> inputs}|>;req = SystemModelAlways[t, "deltaTR"[t] < "deltaTJ"[t] + 10];SystemModelValidate[[image], req, unc]Properties (2)
Validate a requirement producing a SystemModelValidationData object:
model = TransferFunctionModel[{{{2*(1 - a*s)}},
2*(1 + s/2 + s^2)}, s];Specify a parameter uncertainty on a :
unc = <|"ParameterValues" -> {a -> NormalDistribution[1, 0.1]}|>;Set an input function and a number of simulations:
sim = <|"Inputs" -> {1 -> UnitStep}, "SimulationCount" -> 50|>;req = SystemModelAlways[t, 1.55 ≥ Subscript[, 1][t]];val = SystemModelValidate[model, req, Join[unc, sim]]Retrieve the success probability:
val["SuccessProbability"]Retrieve the stored failure configurations:
val["Configuration"]Retrieve the failure plot for the stored failure configuration:
val["FailurePlot", 1]Display a plot of the time intervals where the requirement failed for the stored failure configuration:
val["FailureIntervalsPlot", 1]Validate a requirement producing a SystemModelValidationData object:
model = TransferFunctionModel[{{{2*(1 - a*s)}},
2*(1 + s/2 + s^2)}, s];Specify a parameter uncertainty on a:
unc = <|"ParameterValues" -> {a -> NormalDistribution[1, 0.1]}|>;Set an input function and a number of simulations:
sim = <|"Inputs" -> {1 -> UnitStep}, "SimulationCount" -> 50|>;Retrieve the success probability:
req = SystemModelAlways[t, 1.55 ≥ Subscript[, 1][t]];SystemModelValidate[model, req, Join[unc, sim], "SuccessProbability"]Retrieve the stored failure configurations:
SystemModelValidate[model, req, Join[unc, sim], "Configuration"]Display time intervals where the requirement failed:
SystemModelValidate[model, req, Join[unc, sim], "FailureIntervals"]Retrieve the first time where the requirement failed:
SystemModelValidate[model, req, Join[unc, sim], "FirstFailureTime"]Options (3)
Method (1)
Set a custom simulation method with Method:
req = SystemModelAlways[t, "R2.p.v"[t] ≤ 0.587];SystemModelValidate[[image], req, Method -> {Automatic, "InterpolationPoints" -> 100}]ProgressReporting (1)
Control progress reporting with ProgressReporting:
req = SystemModelAlways[t, "R2.p.v"[t] ≤ 0.587];SystemModelValidate[[image], req, ProgressReporting -> False]SamplingPeriod (1)
Validate a requirement with uncertainty generated when an ARIMAProcess is used for an input:
unc = <|"Inputs" -> {"T" -> ARIMAProcess[{-.01}, 1, {.01}, 10 ^ -6]}|>;Specify a simulation interval and a number of simulations:
sim = <|"SimulationInterval" -> {0, 10}, "SimulationCount" -> 50|>;Set a custom sampling period when sampling the random process when validating:
req = SystemModelAlways[t, -0.2 < "syse.sys.rs"[t] < 0.2];SystemModelValidate[[image], req , Join[unc, sim], SamplingPeriod -> 5]Applications (4)
Measurement Validation (1)
Start with a model of a camera attached to the top of a moving vehicle:
model = \!\(\*GraphicsBox[«8»]\);Simulate the model with a vertical force perturbation:
bumpInputs = <|"Inputs" -> {"fa" -> Function[t, 0], "fw" -> Function[t, 2000 UnitStep[t]]}|>;
simModel = SystemModelSimulate[model, 20, bumpInputs]Plot the position of the camera:
SystemModelPlot[simModel, "xce", PlotRange -> All]Compute the settling time for the position of the camera with a 25% settling threshold:
settlingT = SystemModelMeasurements[<|"Model" -> simModel, "Outputs" -> "xce"|>, "SettlingTime"]Compute the initial and final values for the position of the camera:
{start, stop} = simModel["SimulationInterval"];
{xInit, xFinal} = simModel["xce", {start, stop}];Use validation to verify the measurement of the settling time using its definition:
req = SystemModelAlways[t, settlingT ≤ t, Abs["xce"[t] - xFinal] / Abs[xFinal - xInit] ≤ 0.02];SystemModelValidate[simModel, req]Earlier times do not satisfy the condition:
reqEarly = SystemModelAlways[t, settlingT - 0.01 ≤ t, Abs["xce"[t] - xFinal] / Abs[xFinal - xInit] ≤ 0.02];SystemModelValidate[simModel, reqEarly]Electrical Vehicle (1)
Start with a simple model of an electrical vehicle following the US EPA Highway Fuel Economy Driving Schedule (HWFET):
model = \!\(\*GraphicsBox[«8»]\);Validate the requirement, "The temperature in the battery can only be above 28 ºC for an interval of at most 8.5 minutes.":
req = SystemModelAlways[t, !SystemModelSustain["T"[t] > 28 + 273.15, {Quantity[8.5, "Minutes"], Infinity}]];valT = SystemModelValidate[model, req]valT["FailurePlot", 1]Plot the temperature with the bound:
SystemModelPlot[model, {"T", 28 + 273.15}, GridLines -> {MinMax[valT["FailureIntervals", 1]] / 3600, None}, GridLinesStyle -> Directive[Thick, LightDarkSwitched[Darker[Red]], Dashed]]The requirement fails only in one occasion. To see this, validate the requirement, "The temperature in the battery can reach at most 28 ºC.":
valT2 = SystemModelValidate[model, SystemModelAlways[t, "T"[t] ≤ 28 + 273.15]]Compute the failure interval lengths to see that only one interval is longer than 8.5 minutes:
ArcLength /@ valT2["FailureIntervals", All] / 60System Tolerance (1)
The performance of a circuit depends heavily on its components and parameter tolerances. When the resistance of one of the components in this model of a speaker follows a truncated normal distribution, the variation in the current going through the speaker can be measurable:
model = [image];Set the resistance uncertainty:
unc = <|"ParameterValues" -> {"r1.R" -> TruncatedDistribution[{0, ∞}, NormalDistribution[6, 5]]}|>;Set the simulation interval and the number of simulations:
sim = <|"SimulationInterval" -> Quantity[40., "Milliseconds"], "SimulationCount" -> 50|>;Plot the uncertainty in the speaker current:
SystemModelUncertaintyPlot[model, Join[<|"Outputs" -> "speaker.l.i"|>, unc, sim]]Use the uncertainty to sample and validate a requirement for a bound for the distance between the simulation results and reference data:
inFun = Interpolation[{...}];req = SystemModelAlways[t, Abs["speaker.l.i"[t] - inFun[t]] ≤ 0.001];val = SystemModelValidate[model, req, Join[unc, sim]]Extract a failure configuration, simulate the model and fetch the simulation result:
simConf = SystemModelSimulate[model, Quantity[40., "Milliseconds"], val["Configuration", 1]]i[t] = simConf["speaker.l.i", t]Plot the distance between the result for the failure configuration and the reference data:
Plot[Evaluate[{Abs[i[t] - inFun[t]], 0.001}], {t, 0, 0.04}, PlotRange -> All]val["FailureIntervalsPlot", 1]Orbit Stability (1)
Validate the stability of a toy spacecraft in a circular orbit against force disturbances:
model = [image];Bounds for the radial coordinate should be respected when a radial force that follows a WienerProcess acts on it:
unc = <|"Inputs" -> {"fr" -> WienerProcess[0, 10^-3]}|>;sim = <|"SimulationCount" -> 50|>;Set a number of stored failure configurations:
rep = <|"MaxFailureIntervals" -> 3|>;req = SystemModelAlways[t, 0.37 < r[t] < 0.39];val = SystemModelValidate[model, req, Join[unc, sim, rep], SamplingPeriod -> 100]Extract the failure configurations and plot them together with the bounds:
failures = val["Configuration"];SystemModelPlot[model, r, #, ...]& /@ failures//QuietResample and plot the uncertainty for the radial coordinate:
SystemModelUncertaintyPlot[model, Join[<|"Outputs" -> "r"|>, unc, sim], ...]Related Links
Text
Wolfram Research (2025), SystemModelValidate, Wolfram Language function, https://reference.wolfram.com/language/ref/SystemModelValidate.html.
CMS
Wolfram Language. 2025. "SystemModelValidate." Wolfram Language & System Documentation Center. Wolfram Research. https://reference.wolfram.com/language/ref/SystemModelValidate.html.
APA
Wolfram Language. (2025). SystemModelValidate. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/SystemModelValidate.html