SystemsModelFeedbackConnect[sys1,sys2,{out1,…},{{in1,ftype1},…}]
connects output outi of sys1 to the i![]() input of sys2 and the j
input of sys2 and the j![]() output of sys2 to input inj of sys1 with feedback type ftypej.
output of sys2 to input inj of sys1 with feedback type ftypej.


SystemsModelFeedbackConnect
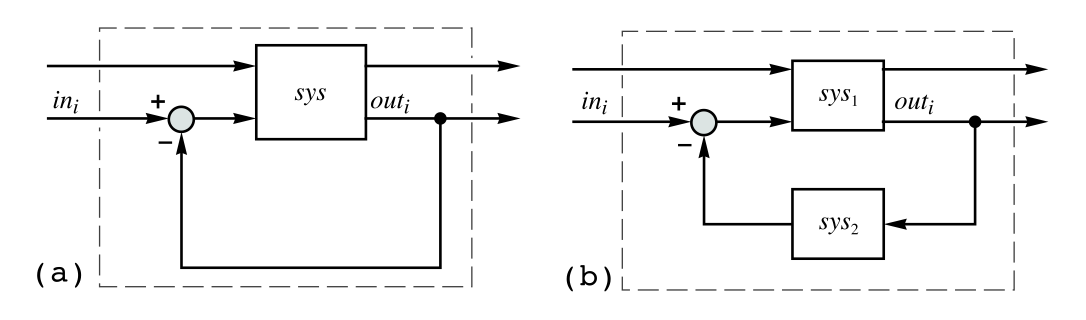
SystemsModelFeedbackConnect[sys]
connects the outputs from sys to the inputs with negative feedback.
SystemsModelFeedbackConnect[sys,{con1,…}]
only feedback connect the outputs and inputs in coni.
SystemsModelFeedbackConnect[sys1,sys2]
connects the outputs of sys1 to sys2 and the outputs of sys2 to the inputs of sys1 in feedback.
SystemsModelFeedbackConnect[sys1,sys2,{out1,…},{{in1,ftype1},…}]
connects output outi of sys1 to the i![]() input of sys2 and the j
input of sys2 and the j![]() output of sys2 to input inj of sys1 with feedback type ftypej.
output of sys2 to input inj of sys1 with feedback type ftypej.
Details
- The systems model sysi can be a TransferFunctionModel, StateSpaceModel, AffineStateSpaceModel, or NonlinearStateSpaceModel.
- Connections coni can be given as:
-
{out,in} connect output out to input in in negative feedback {out,in,ftype} use positive or negative feedback type ftype - By default, sys2 is a unity gain system.
- The arguments in, out, ini, and outi are integers specifying the positions of the input or output channels.
- The ftype can be specified as "Negative" or -1 for negative feedback, and "Positive" or 1 for positive feedback. The default type is "Negative".
Examples
open all close allBasic Examples (6)
A transfer function with negative unity feedback:
SystemsModelFeedbackConnect[TransferFunctionModel[{{{k}}, 1 + s*τ}, s]]Connect two continuous-time systems in negative feedback:
SystemsModelFeedbackConnect[TransferFunctionModel[{{{1}}, s*α}, s], TransferFunctionModel[{{{b + s}}, a + s},
s]]Connect two discrete-time systems in negative feedback:
SystemsModelFeedbackConnect[TransferFunctionModel[{{{b + z}}, a + z},
z, SamplingPeriod -> T], TransferFunctionModel[{{{z + β}}, z + α},
z, SamplingPeriod -> T]]A state-space system with negative feedback:
SystemsModelFeedbackConnect[StateSpaceModel[{{{a}}, {{b}}, {{c}}, {{d}}},
SamplingPeriod -> None, SystemsModelLabels -> None]]Connect two state-space systems:
SystemsModelFeedbackConnect[StateSpaceModel[{{{0, 1}, {-Subscript[α, 0], -Subscript[α, 1]}},
{{0}, {1}}, {{Subscript[β, 0], Subscript[β, 1]}}, {{0}}},
SamplingPeriod -> None, SystemsModelLabels -> None], StateSpaceModel[{{{0, 1, 0}, {0, 0, 1}, {-Subscript[a, 0],
-Subscript[a, 1], -Subscript[a, 2]}}, {{0}, {0}, {1}},
{{Subscript[b, 0], Subscript[b, 1], Subscript[b, 2]}},
{{0}}}, SamplingPeriod -> None, SystemsModelLabels -> None]]Feedback the second output to the first input:
SystemsModelFeedbackConnect[TransferFunctionModel[{{{Subscript[k, 1]}, {Subscript[k, 2]}},
{{z + Subscript[β, 1]},
{z + Subscript[β, 2]}}}, z, SamplingPeriod -> 1], {2, 1}]Scope (18)
Basic Uses (10)
A unity negative feedback system:
SystemsModelFeedbackConnect[TransferFunctionModel[{{{Subscript[α, 1]}},
s + Subscript[β, 1]}, s]]SystemsModelFeedbackConnect[TransferFunctionModel[{{{Subscript[α, 1]}},
s + Subscript[β, 1]}, s], "Positive"]SystemsModelFeedbackConnect[StateSpaceModel[{{{Subscript[a, 11], Subscript[a, 12]},
{Subscript[a, 21], Subscript[a, 22]}},
{{Subscript[b, 11]}, {Subscript[b, 21]}},
{{Subscript[c, 11], Subscript[c, 12]}}, {{0}}}, SamplingPeriod -> None,
SystemsModelLabels -> None], StateSpaceModel[{{{Subscript[α, 11], Subscript[α, 12]},
{Subscript[α, 21], Subscript[α, 22]}},
{{Subscript[β, 11]}, {Subscript[β, 21]}},
{{Subscript[γ, 11], Subscript[γ, 12]}}, {{0}}},
SamplingPeriod -> None, SystemsModelLabels -> None]]Connect multivariable systems:
SystemsModelFeedbackConnect[StateSpaceModel[{{{Subscript[a, 11], Subscript[a, 12]},
{Subscript[a, 21], Subscript[a, 22]}},
{{Subscript[b, 11]}, {Subscript[b, 21]}},
{{Subscript[c, 11], Subscript[c, 12]},
{Subscript[c, 21], Subscript[c, 22]}}, {{0}, {0}}},
SamplingPeriod -> None, SystemsModelLabels -> None], StateSpaceModel[{{{Subscript[α, 11], Subscript[α, 12]},
{Subscript[α, 21], Subscript[α, 22]}},
{{Subscript[β, 11], Subscript[β, 12]},
{Subscript[β, 21], Subscript[β, 22]}},
{{Subscript[γ, 11], Subscript[γ, 12]}}, {{0, 0}}},
SamplingPeriod -> None, SystemsModelLabels -> None]]Connect the second output to the first input:
SystemsModelFeedbackConnect[StateSpaceModel[{{{Subscript[a, 11], Subscript[a, 12]},
{Subscript[a, 21], Subscript[a, 22]}},
{{Subscript[b, 11], Subscript[b, 12]},
{Subscript[b, 21], Subscript[b, 22]}},
{{Subscript[c, 11], Subscript[c, 12]},
{Subscript[c, 21], Subscript[c, 22]}}, {{0, 0}, {0, 0}}},
SamplingPeriod -> None, SystemsModelLabels -> None], {2, 1}]Connect the second output to the first input through a feedback system:
SystemsModelFeedbackConnect[StateSpaceModel[{{{Subscript[a, 11], Subscript[a, 12]},
{Subscript[a, 21], Subscript[a, 22]}},
{{Subscript[b, 11], Subscript[b, 12]},
{Subscript[b, 21], Subscript[b, 22]}},
{{Subscript[c, 11], Subscript[c, 12]},
{Subscript[c, 21], Subscript[c, 22]}}, {{0, 0}, {0, 0}}},
SamplingPeriod -> None, SystemsModelLabels -> None], StateSpaceModel[{{{Subscript[α, 11], Subscript[α, 12]},
{Subscript[α, 21], Subscript[α, 22]}},
{{Subscript[β, 11], Subscript[β, 12]},
{Subscript[β, 21], Subscript[β, 22]}},
{{Subscript[γ, 11], Subscript[γ, 12]}}, {{0, 0}}},
SamplingPeriod -> None, SystemsModelLabels -> None], {2}, {1}]Connect discrete-time systems:
SystemsModelFeedbackConnect[StateSpaceModel[{{{Subscript[p, 1]}}, {{1}}, {{Subscript[k, 1]}}, {{0}}},
SamplingPeriod -> T, SystemsModelLabels -> None], StateSpaceModel[{{}, {}, {}, {{Subscript[k, 2]}}}, SamplingPeriod -> T,
SystemsModelLabels -> None]]Connect two systems in positive feedback:
SystemsModelFeedbackConnect[TransferFunctionModel[{{{Subscript[α, 1]}},
s + Subscript[β, 1]}, s], TransferFunctionModel[{{{Subscript[γ, 2]}},
s + Subscript[δ, 2]}, s], "Positive"]Connect two state-space models as shown in the diagram:
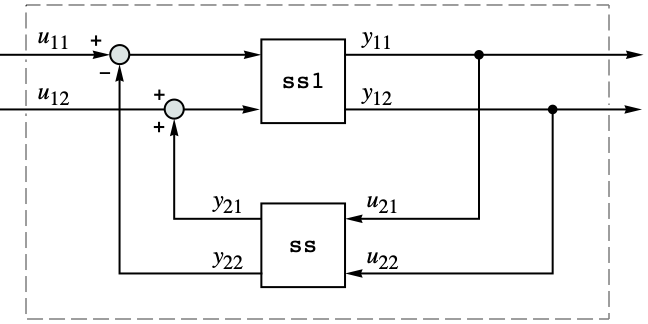
SystemsModelFeedbackConnect[StateSpaceModel[{{{Subscript[a, 11], Subscript[a, 12]},
{Subscript[a, 21], Subscript[a, 22]}},
{{Subscript[b, 11], Subscript[b, 12]},
{Subscript[b, 21], Subscript[b, 22]}},
{{Subscript[c, 11], Subscript[c, 12]},
{Subscript[c, 21], Subscript[c, 22]}},
{{Subscript[d, 11], Subscript[d, 12]},
{Subscript[d, 21], Subscript[d, 22]}}}, SamplingPeriod -> None,
SystemsModelLabels -> None], StateSpaceModel[{{{Subscript[a, 1], 0}, {0, Subscript[a, 2]}},
{{Subscript[b, 1], 0}, {0, Subscript[b, 2]}},
{{Subscript[c, 1], 0}, {0, Subscript[c, 2]}}, {{0, 0}, {0, 0}}},
SamplingPeriod -> None, SystemsModelLabels -> None], {1, 2}, {{2, "Positive"}, {1, "Negative"}}]Connect a StateSpaceModel to a TransferFunctionModel:
SystemsModelFeedbackConnect[StateSpaceModel[{{{Subscript[a, 11], Subscript[a, 12]},
{Subscript[a, 21], Subscript[a, 22]}},
{{Subscript[b, 11]}, {Subscript[b, 21]}},
{{Subscript[c, 11], Subscript[c, 12]}}, {{0}}}, SamplingPeriod -> None,
SystemsModelLabels -> None], TransferFunctionModel[{{{k}}, s + α}, s]]System Types (8)
Connect two TransferFunctionModel systems:
SystemsModelFeedbackConnect[TransferFunctionModel[{{{a}}, p + s}, s], TransferFunctionModel[{{{α}}, s + ρ}, s]]SystemsModelFeedbackConnect[TransferFunctionModel[{{{a/E^(s*T)}},
p + s}, s], TransferFunctionModel[{{{α/E^(s*τ)}},
s + ρ}, s]]Using improper transfer functions:
SystemsModelFeedbackConnect[TransferFunctionModel[{{{a + s}}, 1}, s], TransferFunctionModel[{{{s + α}}, 1}, s]]Connect two StateSpaceModel systems:
SystemsModelFeedbackConnect[StateSpaceModel[{{{a}}, {{b}}, {{c}}, {{d}}},
SamplingPeriod -> None, SystemsModelLabels -> None], StateSpaceModel[{{{α}}, {{β}}, {{γ}},
{{ρ}}}, SamplingPeriod -> None, SystemsModelLabels -> None]]SystemsModelFeedbackConnect[StateSpaceModel[{{{a + SystemsModelDelay[Subscript[τ, 1]]}},
{{b}}, {{c}}, {{d}}}, SamplingPeriod -> None,
SystemsModelLabels -> None], StateSpaceModel[{{{α + SystemsModelDelay[Subscript[τ, 2]]}},
{{β}}, {{γ}}, {{ρ}}}, SamplingPeriod -> None,
SystemsModelLabels -> None]]Using descriptor state-space models:
SystemsModelFeedbackConnect[StateSpaceModel[{{{a}}, {{b}}, {{c}}, {{d}},
{{e}}}, SamplingPeriod -> None, SystemsModelLabels -> None], StateSpaceModel[{{{α}}, {{β}}, {{γ}},
{{ρ}}, {{η}}}, SamplingPeriod -> None, SystemsModelLabels -> None]]Input linear AffineStateSpaceModel systems:
SystemsModelFeedbackConnect[AffineStateSpaceModel[{{a[Subscript[x, 1]]},
{{b[Subscript[x, 1]]}}, {c[Subscript[x, 1]]},
{{0}}}, {Subscript[x, 1]}, {Subscript[, 1]}, {Automatic}, Automatic,
SamplingPeriod -> None], AffineStateSpaceModel[{{α[Subscript[x, 2]]},
{{β[Subscript[x, 2]]}},
{γ[Subscript[x, 2]]}, {{0}}}, {Subscript[x, 2]},
{Subscript[, 1]}, {Automatic}, Automatic, SamplingPeriod -> None]]General nonlinear NonlinearStateSpaceModel systems:
SystemsModelFeedbackConnect[NonlinearStateSpaceModel[{{Subscript[f, 1][Subscript[x, 1],
Subscript[u, 1]]}, {Subscript[h, 1][Subscript[x, 1],
Subscript[u, 1]]}}, {Subscript[x, 1]},
{Subscript[u, 1]}, {Automatic}, Automatic, SamplingPeriod -> None], NonlinearStateSpaceModel[{{Subscript[f, 2][Subscript[x, 2],
Subscript[u, 2]]}, {Subscript[x, 2]}},
{Subscript[x, 2]}, {Subscript[u, 2]}, {Automatic}, Automatic,
SamplingPeriod -> None]]Connecting a transfer function and state-space model will give a state-space model:
SystemsModelFeedbackConnect[TransferFunctionModel[{{{k*(s + Subscript[z, 1])}},
s + Subscript[p, 1]}, s], StateSpaceModel[{{{a}}, {{b}}, {{c}}, {{0}}},
SamplingPeriod -> None, SystemsModelLabels -> None]]SystemsModelFeedbackConnect[TransferFunctionModel[{{{k/E^(s*Subscript[τ, 1])}},
s + Subscript[p, 1]}, s, SamplingPeriod -> None,
SystemsModelLabels -> None], StateSpaceModel[{{{a + SystemsModelDelay[Subscript[τ, 2]]}},
{{b}}, {{c}}, {{0}}}, SamplingPeriod -> None,
SystemsModelLabels -> None]]Connecting a standard linear system and an input linear system will give an affine model:
SystemsModelFeedbackConnect[TransferFunctionModel[{{{k*(s + Subscript[z, 1])}},
s + Subscript[p, 1]}, s], AffineStateSpaceModel[{{α[x]}, {{β[x]}},
{γ[x]}, {{0}}}, {x}, {Subscript[, 1]}, {Automatic},
Automatic, SamplingPeriod -> None]]SystemsModelFeedbackConnect[StateSpaceModel[{{{a}}, {{b}}, {{c}}, {{d}}},
SamplingPeriod -> None, SystemsModelLabels -> None], AffineStateSpaceModel[{{α[x]}, {{β[x]}},
{γ[x]}, {{0}}}, {x}, {Subscript[, 1]}, {Automatic},
Automatic, SamplingPeriod -> None]]Connecting standard linear or affine system with a nonlinear system gives a nonlinear model:
SystemsModelFeedbackConnect[StateSpaceModel[{{{a}}, {{b}}, {{c}}, {{d}}},
SamplingPeriod -> None, SystemsModelLabels -> None], NonlinearStateSpaceModel[{{f[x, u]}, {x}},
{x}, {u}, {Automatic}, Automatic, SamplingPeriod -> None]]SystemsModelFeedbackConnect[AffineStateSpaceModel[{{a[x]}, {{b[x]}},
{c[x]}, {{d[x]}}}, {x},
{Subscript[, 1]}, {Automatic}, Automatic, SamplingPeriod -> None], NonlinearStateSpaceModel[{{f[x, u]}, {x}},
{x}, {u}, {Automatic}, Automatic, SamplingPeriod -> None]]Generalizations & Extensions (2)
Use one feedback type for all connections:
SystemsModelFeedbackConnect[StateSpaceModel[{{{Subscript[a, 1], 0, 0}, {0, Subscript[a, 2], 0},
{0, 0, Subscript[a, 3]}}, {{Subscript[b, 1], 0, 0},
{0, Subscript[b, 2], 0}, {0, 0, Subscript[b, 3]}},
{{Subscript[c, 1], 0, 0}, {0, Subscript[c, 2], 0},
{0, 0, Subscript[c, 3]}}, {{0, 0, 0}, {0, 0, 0}, {0, 0, 0}}},
SamplingPeriod -> None, SystemsModelLabels -> None], "Positive"]Connect two systems with positive feedback:
SystemsModelFeedbackConnect[StateSpaceModel[{{{Subscript[a, 1], 0, 0}, {0, Subscript[a, 2], 0},
{0, 0, Subscript[a, 3]}}, {{Subscript[b, 1], 0, 0},
{0, Subscript[b, 2], 0}, {0, 0, Subscript[b, 3]}},
{{Subscript[c, 1], 0, 0}, {0, Subscript[c, 2], 0},
{0, 0, Subscript[c, 3]}}, {{0, 0, 0}, {0, 0, 0}, {0, 0, 0}}},
SamplingPeriod -> None, SystemsModelLabels -> None], TransferFunctionModel[{{{Subscript[k, 1], 0, 0}, {0, Subscript[k, 2], 0},
{0, 0, Subscript[k, 3]}}, 1}, s], "Positive"]Applications (5)
Obtain the closed-loop transfer function of a discrete-time system with an integral controller and feedback sensor:
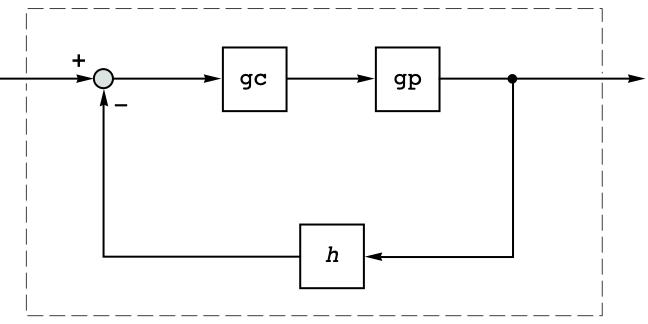
{gp, gc, h} = {TransferFunctionModel[{{{0.003 + 0.0031*z}}, 0.905 - 1.9*z +
z^2}, z, SamplingPeriod -> 0.04], TransferFunctionModel[{{{0.02*z}}, -1 + z}, z,
SamplingPeriod -> 0.04], TransferFunctionModel[{{{0.55}}, -0.45 + z}, z, SamplingPeriod -> 0.04]};fwdpath = SystemsModelSeriesConnect[gp, gc]SystemsModelFeedbackConnect[fwdpath, h]A motor-load servo system with position and velocity feedback:
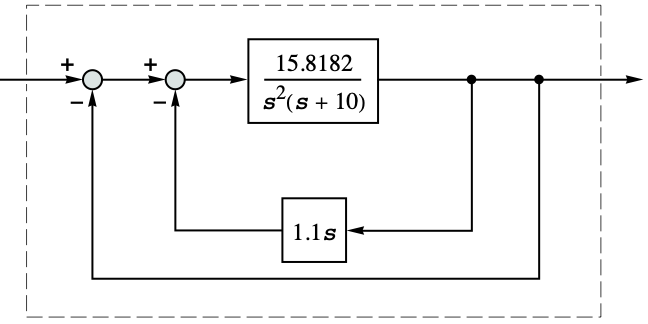
motorLoadDynamics = TransferFunctionModel[{{{15.82}}, s^2*(10 + s)}, s];With only position feedback, the system is unstable:
SystemsModelFeedbackConnect[motorLoadDynamics]//TransferFunctionPolesThe closed-loop system, with rate feedback in the inner loop and position feedback in the outer loop:
closedLoopDynamics = SystemsModelFeedbackConnect[SystemsModelFeedbackConnect[motorLoadDynamics, TransferFunctionModel[{{{1.1*s}}, 1}, s]]]//SimplifyPlot[OutputResponse[closedLoopDynamics, UnitStep[t], {t, 10}]//Evaluate, {t, 0, 10}, PlotRange -> All, GridLines -> Automatic]Use SystemsModelFeedbackConnect in multi-loop reduction:
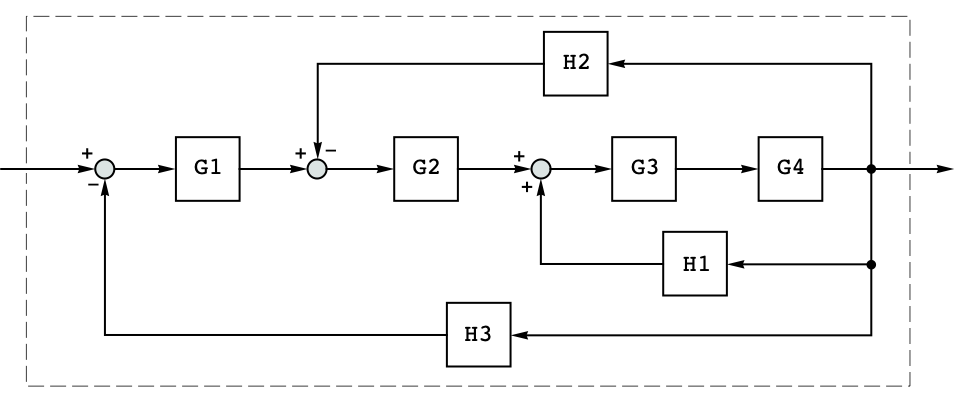
{G1, G2, G3, G4, H1, H2, H3} = {TransferFunctionModel[{{{1}}, 10 + s}, s], TransferFunctionModel[{{{1}}, 1 + s}, s], TransferFunctionModel[{{{1 + s^2}}, 4 + 4*s + s^2},
s], TransferFunctionModel[{{{1 + s}}, 6 + s}, s], TransferFunctionModel[{{{1 + s}}, 2 + s}, s], TransferFunctionModel[{{{2*(6 + s)}}, 1 + s}, s], TransferFunctionModel[{{{1}}, 1}, s]};sys1 = SystemsModelSeriesConnect[G3, G4];
sys2 = SystemsModelFeedbackConnect[sys1, H1, "Positive"];
sys3 = SystemsModelSeriesConnect[G2, sys2];
sys4 = SystemsModelFeedbackConnect[sys3, H2];
sys5 = SystemsModelSeriesConnect[G1, sys4];
Simplify@SystemsModelFeedbackConnect[sys5, H3]Compute the complementary sensitivity function from the loop transfer function:
L = TransferFunctionModel[{{{5*s, 4}, {3, 4*s}},
{{2.3 + s, 6 + s}, {1 + s, 6 + s}}},
s];
SystemsModelFeedbackConnect[L, {{1, 1}, {2, 2}}]A crankshaft receives a delayed input signal from the engine controller:
crankshaft = StateSpaceModel[J w'[t] == Subscript[t, i][t - τ] - Subscript[t, f][t] - Subscript[t, l][t], w[t], {Subscript[t, i][t], Subscript[t, f][t], Subscript[t, l][t]}, w[t], t]Including a simple controller shows the delay is internal to the closed-loop system:
SystemsModelFeedbackConnect[crankshaft, TransferFunctionModel[k, s], {1}, {1}]Properties & Relations (3)
The resulting system has the inputs and outputs of the first system:
{Subscript[ssm, 1], Subscript[ssm, 2]} = {StateSpaceModel[{{{Subscript[a, 1, 1], Subscript[a, 1, 2]},
{Subscript[a, 2, 1], Subscript[a, 2, 2]}},
{{Subscript[b, 1, 1], Subscript[b, 1, 2]},
{Subscript[b, 2, 1], Subscript[b, 2, 2]}},
{{Subscript[c, 1, 1], Subscript[c, 1, 2]},
{Subscript[c, 2, 1], Subscript[c, 2, 2]}}, {{0, 0}, {0, 0}}},
SamplingPeriod -> None, SystemsModelLabels ->
{{Subscript[u, 1], Subscript[u, 2]},
{Subscript[y, 1], Subscript[y, 2]}}], StateSpaceModel[{{{α}}, {{β}}, {{γ}}, {{0}}},
SamplingPeriod -> None, SystemsModelLabels -> None]};SystemsModelFeedbackConnect[Subscript[ssm, 1], Subscript[ssm, 2], {1}, {1}]SystemsModelFeedbackConnect is a special case of SystemsConnectionsModel:
{Subscript[sys, 1], Subscript[sys, 2]} = {StateSpaceModel[{{{0, 1}, {-Subscript[α, 0], -Subscript[α, 1]}},
{{0}, {1}}, {{Subscript[β, 0], Subscript[β, 1]}}, {{0}}},
SamplingPeriod -> None, SystemsModelLabels -> None], StateSpaceModel[{{{0, 1, 0}, {0, 0, 1}, {-Subscript[a, 0],
-Subscript[a, 1], -Subscript[a, 2]}}, {{0}, {0}, {1}},
{{Subscript[b, 0], Subscript[b, 1], Subscript[b, 2]}},
{{0}}}, SamplingPeriod -> None, SystemsModelLabels -> None]};SystemsModelFeedbackConnect[Subscript[sys, 1], Subscript[sys, 2]]SystemsConnectionsModel[{Subscript[sys, 1], Subscript[sys, 2], StateSpaceModel[{{}, {}, {}, {{1, -1}}}, SamplingPeriod -> None, SystemsModelLabels -> None]}, {{3, 1} -> {1, 1}, {1, 1} -> {2, 1}, {2, 1} -> {3, 2}}, {{3, 1}}, {{1, 1}}]//SystemsModelMergeConnect two transfer functions tfm1 and tfm2:
Subscript[tfm, 1] = TransferFunctionModel[RandomReal[5, {3, 3}]];
Subscript[tfm, 2] = TransferFunctionModel[RandomReal[5, {3, 3}]];SystemsModelFeedbackConnect[Subscript[tfm, 1], Subscript[tfm, 2]]This is equivalent to (IdentityMatrix[n]+tfm1.tfm2)-1.tfm1:
TransferFunctionModel[Inverse[IdentityMatrix[3] + Subscript[tfm, 1][s].Subscript[tfm, 2][s]].Subscript[tfm, 1][s], s]Text
Wolfram Research (2010), SystemsModelFeedbackConnect, Wolfram Language function, https://reference.wolfram.com/language/ref/SystemsModelFeedbackConnect.html (updated 2014).
CMS
Wolfram Language. 2010. "SystemsModelFeedbackConnect." Wolfram Language & System Documentation Center. Wolfram Research. Last Modified 2014. https://reference.wolfram.com/language/ref/SystemsModelFeedbackConnect.html.
APA
Wolfram Language. (2010). SystemsModelFeedbackConnect. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/SystemsModelFeedbackConnect.html