

InfiniteLine
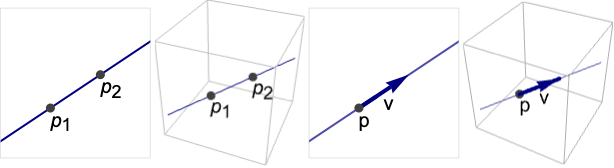
InfiniteLine[{p1,p2}]
represents the infinite straight line passing through the points p1 and p2.
InfiniteLine[p,v]
represents the infinite straight line passing through the point p in the direction v.
Details
- InfiniteLine is also known as line.
- InfiniteLine can be used as a geometric region and graphics primitive.
- InfiniteLine represents linear curve
 or
or  .
. - Hyperplane[n,p] is an alternative representation using a normal n in 2D.
- InfiniteLine can be used in Graphics and Graphics3D.
- InfiniteLine will be clipped by PlotRange when rendering.
- In graphics, the points p, pi and vector v can be Dynamic expressions.
- Graphics rendering is affected by directives such as Thickness, Dashing, and color.
- InfiniteLine can be used with symbolic points in GeometricScene.
Examples
open all close allBasic Examples (3)
An InfiniteLine in 2D:
Graphics[InfiniteLine[{0, 0}, {1, 1}], Frame -> True]Graphics3D[InfiniteLine[{0, 0, 0}, {1, 2, 3}]]Different styles applied to an infinite line:
ℛ = InfiniteLine[{0, 0}, {1, 1}];{Graphics[{Red, ℛ}, Frame -> True], Graphics[{Thick, Red, ℛ}, Frame -> True], Graphics[{Thick, Red, Dashed, ℛ}, Frame -> True]}Test point membership in an infinite line:
ℛ = InfiniteLine[{0, 0}, {1, 1}];{RegionMember[ℛ, {2, 2}], RegionMember[ℛ, {2, 3}]}Scope (19)
Graphics (8)
Specification (3)
Define an InfiniteLine containing ![]() and going in the direction
and going in the direction ![]() :
:
ill = Graphics[{PointSize[Medium], Point[{{1, 1}}], Arrowheads[Medium], Thick, Arrow[{{1, 1}, {3, 2}}]}, PlotRange -> {{0, 4}, {0, 3}}, Frame -> True];Show[ill, Graphics[InfiniteLine[{1, 1}, {2, 1}]]]Define the same line passing through ![]() and
and ![]() :
:
ill = Graphics[{PointSize[Medium], Point[{{1, 1}, {3, 2}}]}, PlotRange -> {{0, 4}, {0, 3}}, Frame -> True];Show[ill, Graphics[InfiniteLine[{{1, 1}, {3, 2}}]]]Define a 3D infinite line containing ![]() and going in the direction
and going in the direction ![]() :
:
ill = Graphics3D[{PointSize[Medium], Point[{{1, 1, 1}}], Arrowheads[Medium], Thick, Arrow[{{1, 1, 1}, {2, 3, 4}}]}, PlotRange -> {{0, 5}, {0, 5}, {0, 5}}, Axes -> True];Show[ill, Graphics3D[InfiniteLine[{1, 1, 1}, {1, 2, 3}]]]Define the same infinite line using the points ![]() and
and ![]() :
:
ill = Graphics3D[{PointSize[Medium], Point[{{1, 1, 1}, {2, 3, 4}}]}, PlotRange -> {{0, 5}, {0, 5}, {0, 5}}, Axes -> True];Show[ill, Graphics3D[InfiniteLine[{{1, 1, 1}, {2, 3, 4}}]]]An infinite line varying direction:
Table[Graphics[InfiniteLine[{0, 0}, {Cos[θ], Sin[θ]}], ImageSize -> Tiny, PlotLabel -> θ], {θ, 0, π, π / 4}]Styling (4)
Table[Graphics[{Thickness[i], InfiniteLine[{{0, 0}, {2, 1}}]}], {i, {.005, .05, .1}}]Thickness in printer's points:
Table[Graphics[{AbsoluteThickness[i], InfiniteLine[{{0, 0}, {2, 1}}]}], {i, {1, 5, 10}}]Infinite lines can be rendered in dashed or dotted styles:
Table[Graphics[{Dashing[i], InfiniteLine[{{0, 0}, {2, 1}}]}], {i, {Tiny, Small, Medium, Large}}]Table[Graphics[{d, InfiniteLine[{{0, 0}, {2, 1}}]}], {d, {Dotted, Dashed, DotDashed}}]Color directives can be used to specify the color of an infinite line:
Table[Graphics[{c, InfiniteLine[{{0, 0}, {2, 1}}]}], {c, {Red, Green, Blue, Yellow}}]Combine various directives to style an infinite line:
Graphics[{Thick, Blue, Dashed, InfiniteLine[{{0, 0}, {2, 1}}]}]Coordinates (1)
Points and vectors can be Dynamic:
DynamicModule[{θ = 0}, {Slider[Dynamic[θ], {0, Pi}], Graphics[InfiniteLine[{0, 0}, Dynamic[{Cos[θ], Sin[θ]}]]]}]Regions (11)
Embedding dimension is the dimensionality of the vertices:
RegionEmbeddingDimension[InfiniteLine[{{x0, y0}, {x1, y1}}]]RegionEmbeddingDimension[InfiniteLine[{x, y, z}, {a, b, c}]]Geometric dimension is the dimension of the region:
RegionDimension[InfiniteLine[{{x0, y0}, {x1, y1}}]]RegionDimension[InfiniteLine[{x, y, z}, {a, b, c}]]RegionMember[InfiniteLine[{{0, 0, 0}, {1, 1, 1}}], {2, 2, 2}]RegionMember[InfiniteLine[{1, 1}, {2, 2}], {0, -1}]Get conditions for membership:
RegionMember[InfiniteLine[{{x0, y0}, {x1, y1}}], {x, y}]An infinite line is unbounded:
ℛ = InfiniteLine[{{0, 0}, {1, 1}}];BoundedRegionQ[ℛ]RegionBounds[ℛ]InfiniteLine has infinite measure:
ℛ = InfiniteLine[{{0, 0}, {1, 1}}];RegionMeasure[ℛ]RegionCentroid[ℛ]ℛ = InfiniteLine[{{2, 2}, {3, 3}}];RegionDistance[ℛ, {0, 1}]Plotting distance to the region:
{Plot3D[Evaluate@RegionDistance[ℛ, {x, y}], {x, -2, 2}, {y, -2, 2}, MeshFunctions -> {#3&}, Mesh -> 5], ContourPlot[Evaluate[RegionDistance[ℛ, {x, y}]], {x, -3, 3}, {y, -3, 3}, Contours -> {{0.5, Red}, {1, Green}, {1.5, Blue}}]}ℛ = InfiniteLine[{{2, 2}, {3, 3}}];SignedRegionDistance[ℛ, {0, -1}]Distance to the nearest point:
Plot3D[SignedRegionDistance[ℛ, {x, y}], {x, -2, 2}, {y, -2, 2}, MeshFunctions -> {#3&}, Mesh -> 5]ℛ = InfiniteLine[{{2, 2}, {3, 3}}];RegionNearest[ℛ, {5, 6}]pts = Table[{1, 2} + 5{Cos[k 2 π / 16], Sin[k 2π / 16]}, {k, 0., 15}];
nst = RegionNearest[ℛ, #]& /@ pts;Legended[Graphics[{{Gray, ℛ}, {Thin, Gray, Line[Transpose[{pts, nst}]]}, {Red, Point[pts]}, {Blue, Point[nst]}}], PointLegend[{Red, Blue}, {"start", "nearest"}]]Integrate over an infinite line:
ℛ = InfiniteLine[{{0, 0}, {1, 1}}];Integrate[Exp[-x y], {x, y}∈ℛ]Optimize over an infinite line:
ℛ = InfiniteLine[{0, 0}, {1, 1}];Minimize[{(x y - 1)^2 + 3, {x, y}∈ℛ}, {x, y}]Solve equations on an infinite line:
ℛ = InfiniteLine[{0, 0, 0}, {1, 2, 3}];Solve[x^2 + y^2 + z^2 == 1 && {x, y, z}∈ℛ, {x, y, z}]Graphics3D[{{Opacity[0.5], Sphere[]}, ℛ, {Red, PointSize[Large], Point[{x, y, z} /. %]}}]Applications (17)
Create parallel lines aligned to ![]() :
:
lines = Table[InfiniteLine[{0, y}, {1, 1}], {y, 5}];Graphics[lines, PlotRange -> {{-6, 6}, {0, 6}}]asym = InfiniteLine[{0, 0}, {1, 1}];Plot[(x ^ 2 + x + 1/x + 1), {x, -1, 7}, Epilog -> {Red, Dashed, asym}, PlotRange -> 7]ParametricPlot[{t + Cos[14 t] / t, t + Sin[14 t] / t}, {t, 0.01, 10}, Epilog -> {Red, Dashed, asym}]Convert the intercept form of a line to an InfiniteLine:
a = 2;
b = 3;ir = ImplicitRegion[(x/a) + (y/b) == 1, {x, y}];il = InfiniteLine[{{a, 0}, {0, b}}];Table[RegionPlot[r, PlotRange -> {{0, 3}, {0, 3}}], {r, {ir, il}}]Convert the point slope form of a line to an InfiniteLine:
m = 2 / 3;
{x0, y0} = {1, 2};ir = ImplicitRegion[y - y0 == m(x - x0), {x, y}];il = InfiniteLine[{x0, y0}, {1, m}];Table[RegionPlot[r, PlotRange -> {{0, 3}, {0, 3}}], {r, {ir, il}}]Convert the slope intercept form of a line to an InfiniteLine:
m = 2 / 3;
b = 1;ir = ImplicitRegion[y == m x + b, {x, y}];il = InfiniteLine[{0, b}, {1, m}];Table[RegionPlot[r, PlotRange -> {{0, 3}, {0, 3}}], {r, {ir, il}}]Convert the two-point form of a line to an InfiniteLine:
{x0, y0} = {0, 2};
{x1, y1} = {3, 1};ir = ImplicitRegion[y - y0 == (y1 - y0/x1 - x0)(x - x0), {x, y}];il = InfiniteLine[{{x0, y0}, {x1, y1}}];Table[RegionPlot[r, PlotRange -> {{0, 3}, {0, 3}}], {r, {ir, il}}]Convert the parametric form of a line to an InfiniteLine:
a = 2;
b = 3;
{x0, y0} = {1, 2};pr = ParametricRegion[{x0 + a t, y0 + b t}, {t}];il = InfiniteLine[{{x0, y0}, {x0 + a, y0 + b}}];Table[RegionPlot[r, PlotRange -> {{0, 3}, {0, 3}}], {r, {pr, il}}]The tangent line to a parametric curve f[u] is given by InfiniteLine[f[u],f'[u]]. Find the tangent line to the parametric curve ![]() :
:
f1[u_] := {Cos[u], Sin[u]};c1 = ParametricPlot[f1[u], {u, 0, 2π}];
t1 = With[{u = π / 4}, Graphics[InfiniteLine[f1[u], f1'[u]]]];Show[c1, t1, PlotRange -> {{-2, 2}, {-2, 2}}]Find the tangent line for the parametric curve ![]() :
:
f2[u_] := {Cos[u], Sin[u], u / 10};c2 = ParametricPlot3D[f2[t], {t, 0, 20}];
t2 = With[{u = 4}, Graphics3D[InfiniteLine[f2[u], f2'[u]]]];Show[c2, t2, PlotRange -> {{-2, 2}, {-2, 2}, All}]Find the intersection of InfiniteLine[{0,0},{1,1}] and InfiniteLine[{{0,1},{1,0}}]:
line1 = InfiniteLine[{0, 0}, {1, 1}];
line2 = InfiniteLine[{{0, 1}, {1, 0}}];sol = Solve[{x, y}∈line1∧{x, y}∈line2, {x, y}]Graphics[{{Lighter[Blue, 0.5], line1, line2}, {Red, Point[{x, y} /. sol]}}, Axes -> True, ImageSize -> Small]Find the intersections of InfiniteLine[{0,0},{1,1}] and Circle[{0,0},1]:
line = InfiniteLine[{0, 0}, {1, 1}];
circle = Circle[{0, 0}, 1];sol = Solve[{x, y}∈line∧{x, y}∈circle, {x, y}]Graphics[{{Lighter[Blue, 0.5], line, circle}, {Red, Point[{x, y} /. sol]}}, ImageSize -> Small]Find all pairwise intersections between five random lines:
lines = InfiniteLine /@ RandomReal[1, {5, 2, 2}];Use BooleanCountingFunction to express that exactly two conditions are true:
sol = NSolve[{x, y}∈BooleanRegion[BooleanCountingFunction[{2}, 5], lines], {x, y}]Graphics[{{Lighter[Blue, 0.5], lines}, {Red, PointSize[Medium], Point[{x, y} /. sol]}}]Find the intersection of InfiniteLine[{{-1,1,1},{1,1,1}}] and InfinitePlane[{{2,0,0},{0,2,0},{0,0,2}}]:
line = InfiniteLine[{{-1, 1, 1}, {1, 1, 1}}];
plane = InfinitePlane[{{2, 0, 0}, {0, 2, 0}, {0, 0, 2}}];sol = Solve[{{x, y, z}∈line, {x, y, z}∈plane}, {x, y, z}]Graphics3D[{{Opacity[0.5], line, plane}, {Red, PointSize[Large], Point[{x, y, z} /. sol]}}, Axes -> True, PlotRange -> {{-2, 2}, {-2, 2}, {-2, 2}}]Find the intersections of InfiniteLine[{{-1,1,1},{1,1,1}}] and Sphere[{0,0,0},3]:
line = InfiniteLine[{{-1, 1, 1}, {1, 1, 1}}];
sphere = Sphere[{0, 0, 0}, 3];sol = Solve[{{x, y, z}∈line, {x, y, z}∈sphere}, {x, y, z}]Graphics3D[{{Opacity[0.5], line, sphere}, {Red, PointSize[Large], Point[{x, y, z} /. sol]}}, PlotRangePadding -> 0.5]Find the intersections of InfiniteLine[{{-1,1/3,1/2},{1,1/3,1/2}}] and the boundary of Tetrahedron[{{0,0,0},{1,0,0},{0,1,0},{0,0,1}}]:
line = InfiniteLine[{{-1, 1 / 3, 1 / 2}, {1, 1 / 3, 1 / 2}}];
tet = RegionBoundary@Tetrahedron[{{0, 0, 0}, {1, 0, 0}, {0, 1, 0}, {0, 0, 1}}];sol = Solve[{x, y, z}∈RegionIntersection[line, tet], {x, y, z}]Graphics3D[{{Opacity[0.5], line, Tetrahedron[{{0, 0, 0}, {1, 0, 0}, {0, 1, 0}, {0, 0, 1}}]}, {Red, PointSize[Medium], Point[{x, y, z} /. sol]}}, PlotRangePadding -> 0.2]data = RandomVariate[NormalDistribution[1, 9], 200];h = Histogram[data];m = Graphics[{Dashed, Red, InfiniteLine[{Mean[data], 0}, {0, 1}]}];Show[h, m]Visualize the axis of rotation for RotationTransform:
v = {4, 2, -5};
p = {2, 2, 3 / 2};axis = InfiniteLine[p, v];rt[θ_] := RotationTransform[θ, v, p];g = Graphics3D[Table[{GeometricTransformation[Sphere[], rt[θ]]}, {θ, 0, 2Pi, 2Pi / 8}], Boxed -> False];Show[g, Graphics3D[{Thick, Blue, Dashed, axis}]]Find the altitude of a triangle:
{a, b, c} = {{0, 0}, {3, 0}, {-1, 2}};base = InfiniteLine[{a, b}];foot = RegionNearest[base, c];altitude = Line[{c, foot}];Graphics[{{LightBlue, Triangle[{a, b, c}]}, {Thick, Darker@LightBlue, base}, {PointSize@Medium, Red, Point[{c, foot}]}, {Dashed, Red, altitude}}]Properties & Relations (5)
InfiniteLine[{p1,p2}] is equivalent to InfiniteLine[p1,p2-p1]:
Subscript[ℛ, 1] = InfiniteLine[{{1, 0}, {2, 2}}];
Subscript[ℛ, 2] = InfiniteLine[{1, 0}, {1, 2}];RegionEqual[Subscript[ℛ, 1], Subscript[ℛ, 2]]InfiniteLine[p,v] is equivalent to Hyperplane[Cross[v],p] in 2D:
Subscript[ℛ, 1] = InfiniteLine[{1, 2}, {1, 1}];Subscript[ℛ, 2] = Hyperplane[Cross[{1, 1}], {1, 2}];RegionEqual[Subscript[ℛ, 1], Subscript[ℛ, 2]]ParametricRegion can represent any InfiniteLine:
Subscript[ℛ, 1] = ParametricRegion[{1, 2} + t{3, 4}, {t}];
Subscript[ℛ, 2] = InfiniteLine[{1, 2}, {3, 4}];RegionEqual[Subscript[ℛ, 1], Subscript[ℛ, 2]]ImplicitRegion can represent any InfiniteLine:
Subscript[ℛ, 1] = ImplicitRegion[y - x == 1, {x, y}];
Subscript[ℛ, 2] = InfiniteLine[{{1, 2}, {3, 4}}];RegionEqual[Subscript[ℛ, 1], Subscript[ℛ, 2]]InfiniteLine is a special case of ConicHullRegion:
pts = {{1, 2}, {3, 4}};RegionEqual[ConicHullRegion[pts], InfiniteLine[pts]]Neat Examples (2)
Graphics[Table[{Hue[RandomReal[]], InfiniteLine[RandomReal[1, {2, 2}]]}, {50}]]Graphics3D[Table[{Hue[RandomReal[]], InfiniteLine[RandomReal[1, {2, 3}]]}, {100}], BoxRatios -> 1]Organized collection of lines:
Graphics[Table[InfiniteLine[{0, 0}, {Cos[θ], Sin[θ]}], {θ, 0., π, π / 50}]]Graphics[Table[InfiniteLine[{Cos[θ], Sin[θ]}, {-Sin[θ], Cos[θ]}], {θ, 0, 2π, π / 20}], PlotRange -> 2]Text
Wolfram Research (2014), InfiniteLine, Wolfram Language function, https://reference.wolfram.com/language/ref/InfiniteLine.html.
CMS
Wolfram Language. 2014. "InfiniteLine." Wolfram Language & System Documentation Center. Wolfram Research. https://reference.wolfram.com/language/ref/InfiniteLine.html.
APA
Wolfram Language. (2014). InfiniteLine. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/InfiniteLine.html